当前位置:首页 >工作快讯工作快讯
喜报!城院学生获2023年全国大学生机器人科技创新交流营暨大赛三等奖!
作者:admin发文单位:共青团东莞城市学院委员会浏览次数:1147更新时间:2024-05-13 17:34:56
瞄准科技前沿,攻关核心技术,服务中心大局,推动机器人领域发展。

由共青团中央、工业和信息化部联合主办的2023年全国大学生机器人科技创新交流营暨大赛圆满结束,我校《自适应管道修复与清理机器人》项目凭借出色的作品和扎实的实力,荣获国赛三等奖,为学校争得荣誉!
作品介绍
项目类别:特种机器人项目类别:特种机器人
项目成员:杨曦 陈俊安 杜茂炜
指导老师:吴蕾
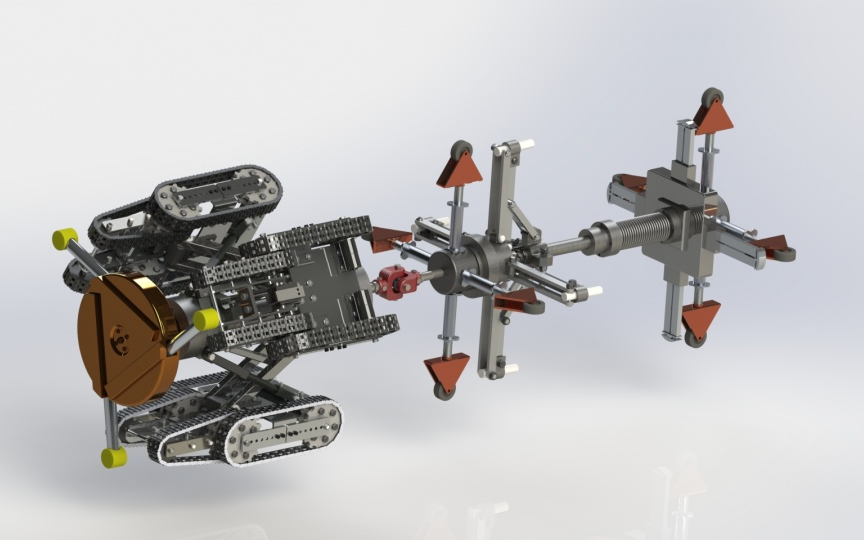
作品简介:本产品是具有自适应管道口径清洗与应急修复的自主、智能的机器人,旨在提供高效的管道清洗和修复服务。采用模块化结构,清洗与修复单元都可以替换拆除变径,易于更换,用户根据自身需求可进行多样化的选择与使用,实现一机多用,降低购买成本。管道机器人机构由清洗单元、修复单元、驱动模块、支撑结构、变径机构、CCD相机及光源(影像系统)组成。三组驱动模块沿圆周方向呈120°均布,驱动模块由伺服电机、减速机、机构等组成,作为独立运动单元,其运动可以单独控制。变径机构由伺服电机、丝杆和连杆机构等部分组成,工作原理是伺服电机经联轴器驱动滚珠丝杠转动进而带动丝杆螺母发生直线往复运动,推动连杆机构改变支撑角度来调整三组驱动模块外径大小,使驱动模块履带与管道内壁保持接触,以适应管道内部直径的变化。机器人支撑结构前端安装有CCD摄像头,可以把机器人检测到的管道内部影像信息呈现在视频显示器中。

指导老师简介
吴蕾,女,毕业于武汉理工大学自动化专业,硕士,高级工程师,机器人与智能制造系主任,主讲工业机器人离线编程及仿真、工业机器人操作实训、PLC原理及应用等专业课程。指导学生参加挑战杯、全国大学生机械创新设计大赛、睿抗机器人开发者大赛等获多个奖项,主持完成湖北省自然科学基金面上项目一项,发表教科研论文十余篇。

创作历程

本次全国大学生机器人科技创新交流营暨大赛以激发青年学生的创新精神和提升科技实践能力为核心目标,致力于推动机器人技术的持续创新与发展。我校对此次大赛高度重视,经过严格选拔,并对备赛进行了周密的安排。

作品设计前,老师带领项目组成员进行了大量的调研及资料的查找,设计的选题结合当下社会城市管道清理的痛点、难点,从而确定了选题的方向“自适应管道修复与清理机器人”。该项目充分利用SolidWorks软件,进行了零件建模、组装、运动仿真以及应力分析等工作,展示了团队成员们深厚的专业知识和出色的创新能力。
本次大赛斩获国家级奖项,不仅是对我校学生科技创新能力的肯定,还将进一步激发我校大学生学习机器人知识、交流机器人技术、传播机器人文化、投身机器人行业、攻关机器人关键核心技术的积极性、主动性、创造性,凸显了学校计算机专业人才培养的质量与特色。学校将进一步加强对学生科技创新能力的培养和支持,为培养更多具有创新精神和实践能力的高素质人才贡献力量!


